دانلود پروژه کنترل سیستم غیرخطی آونگ وارونه | مکافایل
توضیحات محصول
دانلود پروژه کنترل سیستم غیرخطی آونگ وارونه
8 صفحه WORD
فهرست
مقدمه
مدل سازی سیستم (پاندول معکوس و موتور)
مدلسازی پاندول معکوس
مقدمه
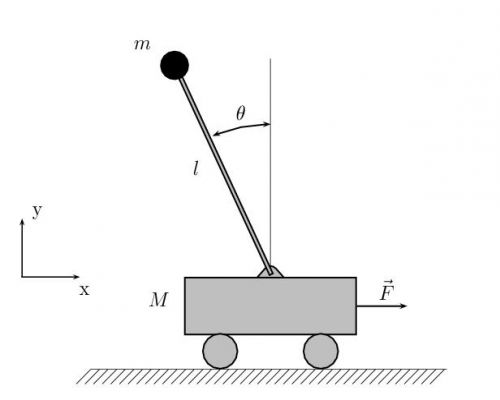
حفظ تعادل یک پاندول معکوس سوار بر روی یک ارابه متحرک که در یک راستا به طور رافقی حرکت می کند، یک مسئله کلاسیک در سیستم های کنترل است. در این پروژه روش های مختلفی جهت بازگرداندن پاندول معکوس از حالت نا متعادل به حالت تعادل و حفظ این حالت ارائه می شود.
پاندول معکوس یک مسئله استاندارد در سیستم های کنترلی بوده و همچنین برای نمایش اصول کنترل خطی ، مانند پایدار کردن سیستم های ناپایدارمفید می باشد. از آنجایی که این سیستم به طور ذاتی غیر خطی است برای نمایش ایده هایی در سیستم های کنترلی غیر خطی نیز مفید می باشد.
در این سیستم یک پاندول معکوس به یک ارابه متصل شده که توسط یک موتور در راستای محور افقی حرکت می کند.ما می توانیم از طریق موتور سرعت و موقعیت معیینی را …
نماد اعتماد الکترونیکی

دروازه پرداخت امن زرین پال
نماد اعتماد الکترونیکی
دروازه پرداخت امن زرین پال